โครงงานราวตากผ้าอัตโนมัติ

ที่มาและความสำคัญ
เนื่องด้วยการใช้ชีวิตประจำวันของมนุษย์ในปัจจุบันเป็นไปอย่างเร่งด่วนต้องการความสะดวกสบาย ประกอบด้วยเทคโนโลยีทางคอมพิวเตอร์และเทคโนโลยีของระบบ Smart Phone ได้ก้าวหน้าไปอย่างรวดเร็วมี Application และ URL ต่าง ๆ ออกมามากมาย เพื่ออำนวยความสะดวกในการใช้ชีวิตของมนุษย์ ทำให้สามารถควบคุมอุปกรณ์ได้อย่างสะดวกสบายง่ายและรวดเร็ว โดยผ่าน Application และ URL โดยเฉพาะระบบเครือข่ายไร้สาย ซึ่งกำลังขยายตัวและใช้งานกันอย่างแพร่หลายจนเป็นส่วนหนึ่งในชีวิตประจำวันมนุษย์ในยุคนี้ จึงมีความต้องการใช้งานเทคโนโลยีต่าง ๆ มากมายเพื่ออำนวยความสะดวก ทำให้มีการใช้พลังงานอย่างสิ้นเปลืองและเกินความจำเป็น ทำให้ค่าใช้จ่ายในการดำรงชีพในสังคมสูงขึ้นตามลำดับ รัฐบาลจึงมีมาตรการให้หน่วยงานรัฐวิสาหกิจ ลดค่าใช้จ่ายด้านพลังงานลงรวมถึงสภาวะโลกร้อนที่มีผลกระทบต่อประชากรโลก ซึ่งเป็นปัจจัยหนี่งที่มนุษย์ต้องช่วยกันประหยัดพลังงาน
ซึ่งสอดคล้องกับปัญหาของนักเรียนโรงเรียนศึกษาสงเคราะห์จิตต์อารีฯ ที่ต้องวิ่งไปเก็บผ้าเมื่อฝนตก บางครั้งนักเรียนอาจจะไปเก็บผ้าในเวลาเรียนทำให้เสียเวลาในการเรียน และบางครั้งฝนตกในเวลาที่นักเรียนว่างจากการเรียน ทำให้ไม่สามารถไปตากผ้าได้ และบางครั้งจะมีแดดออกในเวลาที่นักเรียนกำลังเรียนหนังสือ ส่งผลให้นักเรียนไม่สามารถตากผ้าและเก็บในเวลาที่นักเรียนกำลังเรียนนังสือได้
จึงทำให้เกิดโครงงานราวตากผ้าอัตโนมัติ และจะสั่งผ่านทาง Smart Phone โดยผ่านเว็ปใน URLเพื่อเพิ่มความสะดวกสบายในการตากผ้าที่ไม่ทำให้กังวงในการตากผ้า ให้สามารถเปิด – ปิด ประตูได้ด้วย รวมทั้งสามารถควบคุมเวลาในการทำงานของราวตากผ้าให้เปิด – ปิดเป็นเวลา ซึ่งเป็นปัจจัยหนึ่งของการประหยัดพลังงานและคายกังวลกับการตากผ้า อีกทั้งยังสามารถบอกสถานการณ์ที่เกิดฝนฟ้าอากาศ ซึ่งสามารถใช้เป็นข้อมูลในการควบคุมการเก็บผ้า สามารถสั่งควบคุมได้จากทุก ๆ ที่ทีต้องการได้ขอเพียงมีระบบ Wifi ผ่าน ระบบ Smart Phone โดยเชื่อมโยงระหว่างกันและกันผ่านอินเตอร์เน็ต เครือข่ายในลักษณะนี้เรียกว่า The Internet of Things เรียกย่อ ๆ ว่า IOT
โปรแกรมที่เขียนขึ้นมาผู้จัดทำได้ศึกษาและเรียนในโครงการสิ่งประดิษฐ์สมองกลฝังตัวที่จัดขึ้นที่ 3 ครั้ง ซึ่งโครงการนี้เป็นส่วนหนึ่งของมูลนิธิเทคโนโลยีสารสนเทศตามพระราชดำริฯ แล้วนำมาประยุกต์ใช้ในงานที่เป็นประโยชน์ต่อผู้ที่มีความสนใจที่จะศึกษาต่อไป
วัตถุประสงค์
1. เพื่อสร้างราวตากผ้าที่ใช้งานได้จริงตามต้องการและโดยผ่านการสั่งด้วยระบบ Smart Phone ได้
2. เพื่อเพิ่มความสะดวกสบายให้กับผู้ใช้งาน
3. เพื่อควบคุมราวตากผ้า ผ่านเว็ปใน Application
4. เพื่อลดการคายกังวลในการเก็บผ้า
วัสดุอุปกรณ์

เบรกเกอร์

เพาวเวอร์ ซัพพลาย

ปลั๊กไฟแบบมีกราวด์

สายไฟ Nyy

Push bottoon

หลอดไฟฟแสดง สถาณะ

Terminal block

มอร์เตอร์ปัดน้ำฝน

เซนเซอร์วัดความชื้น

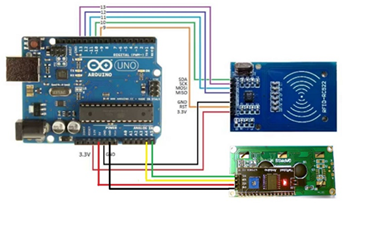
Rasqberry pi 3

เซนเซอร์ตรวจจับน้ำฝน

เซนเซอร์วัดแสง

เซนเซอร์วัดความเร็วลม

arduino
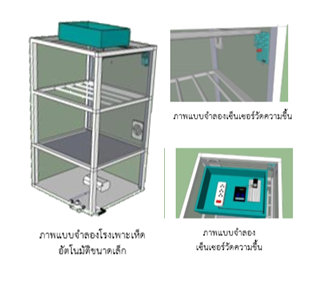
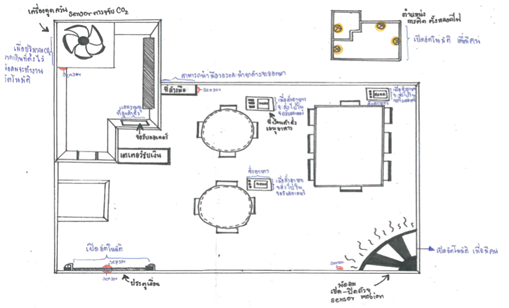
ผังโครงสร้าง

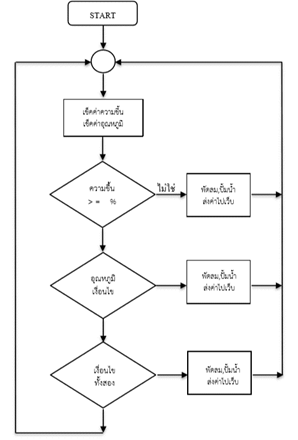
หลักการทำงาน
1. เมื่อต้องการเปิด – ปิดระบบของราวตากผ้าให้ใช้โทรศัพท์เชื่อมต่อกับ Wifi และเว็ปที่เขียนขึ้นใน Raspberry Pi จะทำงานและปล่อย URL เมื่อเข้าเว็ปหน้า Index ขึ้นมาแล้วมีคำสั่งให้เปิดการทำงานของราวตากผ้า
2. เมื่อ Raspberry Pi ได้รับคำสั่งจากเซนเซอร์ และข้อมูลการสั่งงานจาก Smart Phone
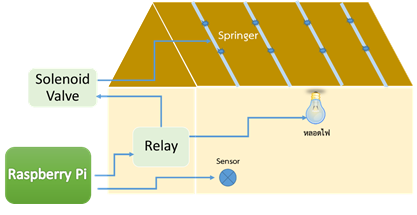
3. Raspberry Pi ก็จะสั่งให้มอเตอร์ไดร์เวอร์ทำงาน มอเตอร์ไดร์เวอร์ก็จะสั่งไปยังมอเตอร์ปัดน้ำฝนให้ทำงาน
4. มอเตอร์ปัดน้ำฝนจะตากผ้า เมื่อรางตากผ้าไปชนกับลิมิตสวิตส์มอเตอร์ปัดน้ำฝนจะหยุดทำงงาน
CODE คำสั่งการทำงาน
to main set Area1_wet (100) set Area1_dry (3) set Area2_wet (100) set Area2_dry (3) set Area3_wet (100) set Area3_dry (3) set Area4_wet (100) set Area4_dry (3) set Area5_wet (100) set Area5_dry (3) set Area6_wet (100) set Area6_dry (3) set Area7_wet (100) set Area7_dry (3) set Area8_wet (100) set Area8_dry (3) forever [ check_time1 check_sensor ] end to check_sensor ifelse sensor1 < Area1_dry and sensor2 < Area2_dry [ a, on ] [ if sensor1 > Area1_wet and sensor2 > Area2_wet [ a, off ] ] ifelse sensor3 < Area3_dry and sensor4 < Area4_dry [ b, on ] [ if sensor3 > Area3_wet and sensor4 > Area4_wet [ b, off ] ] ifelse sensor5 < Area5_dry and sensor6 < Area6_dry [ c, on ] [ if sensor5 > Area5_wet and sensor6 > Area6_wet [ c, off ] ] ifelse sensor7 < Area7_dry and sensor8 < Area8_dry [ d, on ] [ if sensor7 > Area8_wet and sensor8 > Area8_wet [ d, off ] ] end to check_time1 if hours = 6 and minutes = 0 or hours = 18 and minutes = 0 [ if sensor1 < Area1_wet and sensor2 < Area2_wet [ a, off ] if sensor3 < Area3_wet and sensor4 < Area4_wet [ b, on ] if sensor5 < Area5_wet and sensor6 < Area6_wet [ c, on ] if sensor7 < Area7_wet and sensor8 < Area8_wet [ d, off ] wait 9000 abcd, off ] end
ผลของการทดสอบ
ใช้ได้จริงปัจจุบันก็ยังใช้อยู่
รูปการทำงาน

1. ต้องตรวจสอบระบบไฟฟ้าที่เข้าไปเลี้ยงในระบบว่าถูกต้องตาม L N หรือไม่ หากไม่ถูกต้องอาจจะทำให้บอร์ด Raspberry Pi เสียหายได้

2. เปิดระบบ เซอร์กิตเบรกเกอร์

3. เพื่อเปิด เซอร์กิตเบรกเกอร์ รอประมาณ 3 นาที ระบบลีนุกข์ของ Raspberry Pi จะเริ่มทำงาน

4. เข้าไปตั้งค่าระบบ Wifi ให้รับค่าที่สามารถใช้งานได้

5. เข้ารหัส Wifi เพื่อรับค่า Internet

6. เมื่อรหัสผ่านจะมีสัญญาลักษณ์บอกว่าสามารถใช้ Wifi ได้แล้ว และระบบจะปล่อยเว็ปที่ใช้ควบคุมไฟฟ้าออกมา

7. สามารถดูรหัส URL ได้โดยนำเมาส์ไปชี้ที่สัญญาลักษณ์ Wifi ซึ่งรหัสจะเปลี่ยนไปตามสัญญาณ Wifi ที่ใช้

8. นำเอารหัส URL ใส่ลงใน Web Browser ได้ทั้งโทรศัพท์มือถือทั้ง 2 ระบบ แอนดรอยด์ และ iOs จะได้หน้า Inbox โดยจะมีเมนูให้เลือก 2 เมนู คือ เมนูเปิดปิด ตั้งเวลา

9. เมื่อกดตรงที่ตากผ้ามันก็จะเปิดประตู แล้วเลื่อนลานให้ตากผ้า

10. การตั้งเวลาให้ยึดตามเวลาที่ต้องการให้เปิด เช่น มีอุณหภูมิ ความสว่าง ความชื้น แล้วลม บอกในการตากผ้า
คณะผู้จัดทำโครงงาน
- นายอภิสิทธิ์ แซ่กือ
- นางสาวมีน่า เวนเคนยอน
- นางสาวพนิสุภา แซ่เล่า
อาจารย์ที่ปรึกษา
นายวีรศักดิ์ เป้รอด สอนวิชา คอมพิวเตอร์
โทรศัพท์ 081-2897973
E-mail weerasak2018@gmail.com
นางสาวมติกา ใจธรรม สอนวิชา ฟิกสิกส์
โทรศัพท์ 092-5953242
E-mail catmatika.22@gmail.com
โรงเรียนศึกษาสงเคราะจิตต์อารีฯ ลำปาง
ที่อยู่ของโรงเรียน โรงเรียนศึกษาสงเคราะห์จิตต์อารีฯ ตำบลพระบาท อำเภอเมือง จังหวัดลำปาง