โครงงาน “ชุดอุปกรณ์ควบคุมแสงอัตโนมัติในห้องเพาะเลี้ยงเนื้อเยื่อ”
(Automatic light control device in the tissue culture room)

ที่มาและความสำคัญ
แสงแดดเป็นปัจจัยสำคัญต่อการดำรงชีวิตและการเจริญเติบโตของพืช พืชต้องใช้แสงในกระบวนการสังเคราะห์แสงเพื่อสร้างอาหาร พืชเมืองร้อนต้องการแสงที่มีความเข้มมากกว่า 50,000 ลักซ์ จึงจะสามารถการเจริญเติบโตและการดำรงชีวิตต่อไปได้ และความเข้มแสงที่เหมาะสมต่อการเจริญเติบโตของเนื้อเยื่อพืช “หม้อข้าวหม้อแกงลิง” ที่ใช้ทดลองในโครงงานนี้คือ ความเข้มแสงที่ไม่ต่ำกว่า 20,000 ลักซ์
ผู้จัดทำโครงงานได้สังเกตเห็นห้องอนุบาลพืชการเพาะเลี้ยงเนื้อเยื่อซึ่งอยู่ภายในอาคารโรงเรียน ปิยชาติพัฒนาฯ มีปัญหาในเรื่องของแสงแดดที่ส่องเข้าไม่ถึงในบางช่วงเวลา ในบางช่วงนั้นภายในห้องอนุบาลพืชมีความเข้มของแสงต่ำกว่า 20,000 ลักซ์ ซึ่งส่งผล เสียต่อการเจริญเติบโตของพืช
การที่ผู้ดูแลพืชเข้าห้องอนุบาลพืชเพื่อเปิด-ปิดไฟบ่อยครั้งเกินไป อาจทำให้เชื้อโรคจากภายนอกเข้ามาสู่ห้องอนุบาลพืชและทำให้เนื้อเยื่อพืชติดเชื้อได้ แต่หากใช้ Timer ตั้งเวลาในช่วงเวลาที่แสงแดดส่องผ่านหน้าต่างมีความเข้มแสงเพียงพอ ไฟส่องสว่างก็ยังทำงานทำให้สิ้นเปลืองพลังงานไฟฟ้า ผู้จัดทำโครงงานจึงมีแนวคิดออกแบบสมองกลฝังตัวควบคุมการเปิด-ปิดไฟภายในห้องอนุบาลพืช ซึ่งวัตถุประสงค์ของโครงงานต้องการวัดความเข้มแสงภายในห้องอนุบาลพืชให้อยู่ในระดับไม่น้อยกว่า 20,000 ลักซ์ ซึ่งเหมาะสมกับการดำรงชีวิตของเนื้อเยื่อพืชหม้อข้าวหม้อแกงลิง และสามารถนำเครื่องวัดความเข้มแสงที่ได้มาพัฒนามาปรับใช้กับโครงงาน เพื่อควบคุมแสงภายในห้องอนุบาลพืช โดยการควบคุมการเปิด-ปิดไฟภายในห้องอนุบาลพืชโดยอัตโนมัติ โดยที่จะเขียนโปรแกรมชุดคำสั่งควบคุมการเปิด-ปิดไฟภายในห้องอนุบาลพืชโดยอัตโนมัติ และเชื่อมต่อวงจรเข้ากับกับจอแสดงผล LCD เพื่อแสดงค่าความเข้มแสงภายในห้องอนุบาลพืช ณ เวลานั้น และสถานะการเปิด-ปิดของแผงไฟ LED กับค่าความเข้มแสงภายในห้องอนุบาลพืชดังกล่าว จะเชื่อมต่อผ่านเครือข่าย IOT และแสดงผลไปยังอุปกรณ์โทรศัพท์มือถือ เพื่อที่จะประหยัดแรงงานและเวลาในการดูแลเนื้อเยื่อพืชและลดการติดเชื้อในพืช พืชจะได้สามารถเจริญเติบโตได้อย่างมีประสิทธิภาพ
วัตถุประสงค์
- เพื่อสร้างชุดอุปกรณ์ควบคุมแสงอัตโนมัติในห้องเพาะเลี้ยงเนื้อเยื่อที่สามารถควบคุมปริมาณความเข้มของแสงให้พอเพียงต่อการเจริญเติบโตของเนื้อเยื่อพืชในห้องอนุบาลพืช
วัสดุอุปกรณ์
 |
1. ESP8266 Node MCU
|
 |
2. Sensor BH-1750
|
 |
3. Module Relay 1-channal relay 3.3 v |
 |
4. Module LCD I2C |
 |
5. บอร์ดทดลอง |
 |
6. แผงไฟเส้น LEDสีขาว |
 |
7. แผงไฟเส้น LED สีน้ำเงิน-แดง |
 |
8. Adapter 12v |
 |
9. สายไฟจัมพ์ ผู้-ผู้ |
 |
10. สายไฟจัมพ์ ผู้-เมีย |
 |
11. สายไฟอ่อน |
 |
12. Power bank |
 |
13. สายแจ็คตัวเมีย |
 |
14. โมเดลแบบจำลองห้องเพาะเลี้ยงเนื้อเยื่อพืช |
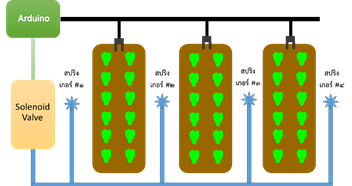
ผังโครงสร้าง

หลักการทำงาน
นำชุดอุปกรณ์ไปติดตั้งบริเวณชั้นวางขวดเพาะเลี้ยงเนื้อเยื่อ โดยหันเซ็นเซอร์แสง BH-1750 ไปรับแสงจากธรรมชาติที่เข้ามาทางหน้าต่างเท่านั้น โดยชุดอุปกรณ์ควบคุมแสงอัตโนมัติ ทำงานโดยการควบคุมความเข้มแสงภายในห้องอนุบาลพืชให้อยู่ในระดับไม่น้อยกว่า 20,000 ลักซ์ หากความเข้มแสงที่ผ่านหน้าต่างเข้ามามีค่าน้อยกว่า 20,000 ลักซ์ ระบบจะสั่งเปิดแผงไฟ LED ในชั้นวางเนื้อเยื่อ และยังสามารถเชื่อมต่อผ่านเครือข่าย IOT เพื่อแสดงผลไปยังอุปกรณ์โทรศัพท์มือถือได้อีกด้วย
ทางคณะผู้จัดทำโครงงานสังเกตเห็นว่า ถ้าหากชุดอุปกรณ์ทำงานตลอด 24 ชั่วโมง พืชจะได้รับแสงมากเกินไป และแสงจะเป็นพิษต่อพืช ทางคณะผู้จัดทำโครงงานจึงได้เสริมอุปกรณ์ Timer เข้าไปในชุดอุปกรณ์ เพื่อที่จะให้ชุดอุปกรณ์ทำงานเฉพาะในช่วงเวลา 6.00 น.- 20.00 น. เท่านั้น เพื่อให้พืชได้รับแสงไฟอย่างพอเหมาะพอดี
CODE คำสั่งการทำงาน
#include <Wire.h>
#define POWER_DOWN_MODE 0x00
#define POWER_ON_MODE 0x01
#define RESET_MODE 0x07
#define M_H_RESOLUTION_MODE 0x10
#define M_H_RESOLUTION_MODE2 0x11
#define M_L_RESOLUTION_MODE 0x13
#define S_H_RESOLUTION_MODE 0x20
#define S_H_RESOLUTION_MODE2 0x21
#define S_L_RESOLUTION_MODE 0x23
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE);
const byte BH1750FVI_ADDR = 0x23;
byte buff[2];
const byte LED_PIN = 5;
void setup() {
pinMode( 7, OUTPUT );
Wire.begin();
Serial.begin( 115200 );
setBH1750Mode( BH1750FVI_ADDR, M_H_RESOLUTION_MODE );
lcd.begin(16,2);
for(int i = 0; i< 3; i++)
{
delay(250);
lcd.noBacklight();
lcd.backlight();
delay(250);
}
}
void loop() {
static byte dc;
uint16_t value;
if( readBH1750( BH1750FVI_ADDR ) == 2 ) {
value = (buff[0]<<8) | buff[1];
value = (5*(uint32_t)value)/6;
Serial.print( value, DEC );
Serial.println("[lx]");
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Light Intensity (lx)");
lcd.setCursor(9,1);
lcd.print(value);
if ( value < 20000 ) {
value = 20000;
digitalWrite( 7, LOW);
}
else{
ผลของการทดสอบ
การดำเนินงานในส่วนของการต่อชุดอุปกรณ์ควบคุมแสงภายในห้องอนุบาลพืช โดยการควบคุม การเปิด-ปิดไฟภายในห้องอนุบาลพืชโดยอัตโนมัติ สำเร็จและเป็นไปตามสมมติฐานของโครงงาน คือ ชุดอุปกรณ์ควบคุมแสงอัตโนมัตินี้สามารถวัดค่าความเข้มแสงและควบคุมการเปิด-ปิดไฟภายในห้องอนุบาลพืชได้จริง สามารถเชื่อมต่อผ่านเครือข่าย IOT เพื่อแสดงผลไปยังอุปกรณ์โทรศัพท์มือถือ และสามารถช่วยให้เนื้อเยื่อพืชที่อยู่ภายในห้องอนุบาลพืชสามารถเจริญเติบโตและดำรงชีวิตได้ดีตามสมมติฐานที่ได้กำหนดไว้ตามข้างต้น
รูปการทำงาน
- นำแผงวงจร ESP8266 Node MCU มาเชื่อมต่อเข้ากับบอร์ดทดลอง
1.1 นำแผงวงจร ESP8266 Node MCU มาเชื่อมต่อเข้ากับบอร์ดทดลอง โดยนำด้านที่มีขามาประกบเข้ากับบอร์ดทดลอง

2 การต่อไฟเลี้ยงจากแผงวงจร ESP8266 Node ต่อเข้ากับบอร์ดทดลอง
2.1 นำสายไฟจัมพ์ สีแดงผู้-ผู้ มาต่อเข้ากับช่อง a22 ในบอร์ดทดลองซึ่งจะตรงกับช่อง vin ในแผงวงจร ESP8266 Node MCU จากนั้นนำมาต่อที่บอร์ดทดลองช่องบวก เพื่อต่อไฟเลี้ยงบวกให้กับบอร์ดทดลอง
2.2 นำสายไฟจัมพ์ สีดำผู้-ผู้ มาต่อเข้ากับช่อง a21 ในบอร์ดทดลองซึ่งจะตรงกับช่อง GND ในแผงวงจร ESP8266 Node MCU จากนั้นนำมาต่อที่บอร์ดทดลองช่องลบ เพื่อต่อไฟเลี้ยงลบให้กับบอร์ดทดลอง

3. การต่อเซนเซอร์วัดความเข้มแสง BH-1750 ต่อกับกับวงจร
3.1 นำสายไฟจัมพ์ สีแดงผู้-เมีย มาต่อเข้ากับ ขา VCC ในเซนเซอร์ และนำปลายสาย ไฟจัมพ์อีกข้างหนึ่ง ต่อเข้ากับช่องบวกในบอร์ดทดลอง จากนั้นนำสายไฟจัมพ์สีดำผู้-เมีย มาต่อเข้ากับ ขา GNDในเซนเซอร์ และนำปลายสายไฟจัมพ์อีกข้างหนึ่งต่อเข้ากับช่องลบในบอร์ดทดลอง
3.2ต่อมานำสายไฟจัมพ์สีเขียวผู้-เมีย มาต่อเข้ากับ ขา SCL ในเซนเซอร์ และนำปลายสายไฟจัมพ์อีกข้างหนึ่งต่อกับช่อง j8 ในบอร์ดทดลองซึ่งจะตรงกับช่อง D1 (ในแผงวงจรปรากฎเป็น D2) ในแผงวงจร ESP8266 Node MCU
3.3 จากนั้นนำสายไฟจัมพ์สีส้มผู้-เมีย มาต่อเข้ากับ ขา SDA ในเซ็นเซอร์ และนำปลายสายไฟจัมพ์อีกข้างหนึ่งต่อกับช่อง j9 ในบอร์ดทดลองซึ่งจะตรงกับช่อง D2 ในแผงวงจร ESP8266 Node MCU

4. การต่อรีเลย์ที่ใช้ในการควบคุมการเปิด-ปิดแผงไฟ LED
4.1 โดยเริ่มต้นจากการ นำสายไฟจัมพ์สีแดงผู้-เมีย มาต่อเข้ากับ ช่อง VCC ในรีเลย์ และนำปลายสายไฟจัมพ์อีกข้างหนึ่ง ต่อเข้ากับช่องบวกในบอร์ดทดลอง จากนั้นนำสายไฟจัมพ์สีดำผู้-เมีย มาต่อเข้ากับ ช่อง GNDในรีเลย์ และนำปลายสายไฟจัมพ์อีกข้างหนึ่ง ต่อเข้ากับช่องลบในบอร์ดทดลอง
4.2 นำสายไฟจัมพ์สีเหลืองผู้-เมีย มาต่อเข้ากับ ช่อง IN ในรีเลย์ และนำปลายสายไฟจัมพ์อีกข้างหนึ่งต่อกับช่อง j7 ในบอร์ดทดลองซึ่งจะตรงกับช่อง D0 ในแผงวงจร ESP8266 Node MCU
4.3 จากนั้นนำแผงไฟ LED ที่ทำการบัดกรีสายไฟเข้ากับแหล่งพลังงานแล้ว โดยเริ่มจากนำสายไฟสีดำที่บัดกรีอยู่กับขั้วลบจากแผงไฟ LED ต่อเข้ากับ ช่อง NC ในรีเลย์ และนำสายไฟสีดำที่บัดกรีกับแหล่งพลังงาน (แจ็คตัวเมีย) ต่อเข้ากับ ช่อง COM ในรีเลย์

5. การต่อจอแสดงผล LCD เข้ากับวงจร
5.1 โดยเริ่มจาก นำสายไฟจัมพ์สีแดงผู้-เมีย มาต่อเข้ากับ ขา VCC ในจอ LCD และนำปลายสายไฟจัมพ์อีกข้างหนึ่ง ต่อเข้ากับช่องบวกในบอร์ดทดลอง จากนั้นนำสายไฟจัมพ์สีดำผู้-เมีย มาต่อเข้ากับ ขา GNDในจอ LCD และนำปลายสายไฟจัมพ์อีกข้างหนึ่ง ต่อเข้ากับช่องลบในบอร์ดทดลอง
5.2 นำสายไฟจัมพ์ขาวผู้-เมีย มาต่อเข้ากับ ขา SDA ในจอ LCD และนำปลายสายไฟจัมพ์อีกข้างหนึ่งบัดกรีเข้ากับสายไฟจัมพ์สีส้มที่เชื่อมต่อกับเซนเซอร์วัดความเข้มแสง BH-1750 ซึ่งเป็นการพ่วงสายเพื่อต่อเข้ากับช่อง j9 ในบอร์ดทดลองซึ่งจะตรงกับช่อง D2 ในแผงวงจร ESP8266 Node MCU
5.3 นำสายไฟจัมพ์สีเทาผู้-เมีย มาต่อเข้ากับ ขา SCL ในจอ LCD และนำปลายสายไฟจัมพ์อีกข้างหนึ่งบัดกรีเข้ากับสายไฟสีเขียวที่เชื่อมต่อกับเซนเซอร์วัดความเข้มแสง BH-1750 ซึ่งเป็นการพ่วงสายเพื่อต่อเข้ากับช่อง j8 ในบอร์ดทดลองซึ่งจะตรงกับช่อง D1 (ในแผงวงจรปรากฎเป็น D2) ในแผงวงจร ESP8266 Node MCU

6. การเปิดการใช้งานของชุดอุปกรณ์
6.1 นำ adapter 12 V มาต่อเข้ากับแจ็คตัวเมียของแผงไฟ LED เพื่อเป็นแหล่งพลังงานให้กับแผงหลอดไฟ LED
6.2 นำ power bank มาต่อเข้ากับแผงวงจร ESP8266 Node MCU เพื่อเป็นแหล่งพลังงานไฟเลี้ยงให้กับ แผงวงจร ESP8266 Node MCU ซึ่งในแผงวงจร ESP8266 Node MCU ซึ่งคณะผู้จัดทำได้ลงโค้ดคำสั่งไว้เรียบร้อยแล้ว
คณะผู้จัดทำโครงงาน
1.นายสุรภีม จิตอารีรัตน์
2.นางสาววิภาดา วงษ์พระจันทร์
3.นางสาวธมนวรรณ ศรีม่วง
อาจารย์ที่ปรึกษา
1. นายกฤติพงศ์ บดีนพพิทักษ์ สอนวิชา เทคโนโลยีสารสนเทศ
โทรศัพท์ 0632432379 E-mail nigorntume21@gmail.com
2. นางสาวรุ่งรัตน์ จีรวิทย์ขจร สอนวิชา เทคโนโลยีสารสนเทศ
โทรศัพท์ 0822424280 E-mail –
โรงเรียนปิยชาติพัฒนา ในพระราชูปถัมภ์ฯ
ที่อยู่ของโรงเรียน 61/3 หมู่ 4 ต.พรหมณี อ. เมือง จ. นครนายก 26001