เครื่องไล่นกพิราบอัตโนมัติ
Automaticpigeon chasing machine

ที่มาและความสำคัญ
ปัจจุบัน นกหลายชนิดได้สร้างความเสียหายให้กับอาคาร สินค้า และผลผลิตทางการเกษตรมากมาย โดยเฉพาะนกพิราบซึ่งมักจะมาอาศัยตามอาคารต่าง ๆ และถ่ายมูลไว้ ซึ่งนอกจากจะสร้างความสกปรกแก่บริเวณอาคารและส่งกลิ่นไม่พึงประสงค์แล้ว ยังเป็นแหล่งแพร่กระจายเชื้อโรคหลายชนิดมาสู่มนุษย์ เช่น โรคปอดอักเสบ, โรคปอดบวม และโรคไข้หวัดนก เป็นต้น ทำให้เสียสุขภาพ เงินเสีย เสียเวลาในการดูแลรักษา หรืออาจมีอาการรุนแรงถึงขั้นเสียชีวิตได้
โรงเรียนศึกษาสงเคราะห์พัทลุง จัดการศึกษาให้กับผู้ด้อยโอกาส 10 ประเภท เปิดสอนระดับชั้นประถมศึกษาปีที่ 1 ถึงมัธยมศึกษาปีที่ 6 เป็นโรงเรียนประจำ นักเรียนพักอาศัยอยู่ในโรงเรียนตลอดเวลา และประสบกับปัญหามีนกพิราบจำนวนมากมาอาศัยอยู่ในโรงเรียน โดยเฉพาะบริเวณอาคารเรียน 2 และอาคารอเนกประสงค์ ทำให้บริเวณดังกล่าวไม่มีความสะอาด ไม่ถูกสุขลักษณะ เสื่อมโทรม และอยู่ในสภาพที่ไม่สามารถใช้ประโยชน์ได้อย่างเต็มที่ ดังนั้นจึงต้องหาวิธีการขับไล่ไม่ให้นกพิราบมาอาศัยอยู่ เพื่อสุขภาพอนามัยที่ดีของผู้ใช้อาคาร เพื่อป้องกันไม่ให้อาคารเสื่อมโทรม และสามารถใช้ประโยชน์จากอาคารได้อย่างเต็มที่ต่อไป
จากการสืบค้นข้อมูล พบว่า ได้มีการใช้วิธีต่าง ๆ เพื่อขับไล่และป้องกันนกพิราบมาหลายวิธี แต่ยังไม่มีวิธีที่แก้ปัญหาได้อย่างสมบูรณ์ โดยจะใช้ได้ผลในระยะแรก ๆ หลังจากนั้นนกก็จะเกิดความเคยชินและกลับมาอีก โรงเรียนศึกษาสงเคราะห์พัทลุงจึงมีแนวคิดในการทำโครงงานพัฒนาเครื่องไล่นกพิราบอัตโนมัติขึ้นมาเพื่อใช้ในการขับไล่นกพิราบให้เกิดประสิทธิผลและประสิทธิภาพสูงสุดในการใช้งาน
วัตถุประสงค์
- เพื่อพัฒนาเครื่องไล่นกพิราบอัตโนมัติที่ใช้สมองกลฝังตัวเป็นส่วนประกอบ โดยประหยัดงบประมาณของโรงเรียนในการป้องกันและกำจัดนกพิราบ
- เพื่อขับไล่นกพิราบให้ออกจากอาคารเรียน ทำให้อาคารเรียนและบริเวณโรงเรียนสะอาด ปราศจากแหล่งสะสมเชื้อโรคที่มาจากนกพิราบ
- เพื่อป้องกันปัญหาการผุกร่อนของอาคารที่เกิดจากนกพิราบ
วัสดุอุปกรณ์
| ลำดับ | วัสดุอุปกรณ์ | จำนวน |
| 1. | Arduino UNO R3 |  |
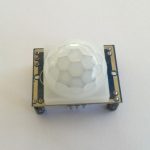
| 2. | PIR Motion Sensor |  |
| 3. | Adapter 9V 1A |  |
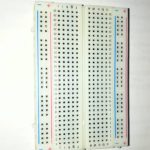
| 4. | โพรโทบอร์ด |  |
| 5. | Buzzer |  |
| 6. | RGB LED module |  |
| 7. | สายไฟจัมเปอร์ |  |
| 8. | สาย USB |  |
แผนผังโครงงาน

หลักการทำงาน
เมื่อมีนกพิราบบินผ่าน Sensor จะส่งข้อมูลไปยัง Arduino เพื่อสั่งการให้ Led และ Buzzer ทำงานโดยส่งสัญญาณไฟกระพริบและเสียง
CODE คำสั่งการทำงาน
void setup() {
pinMode(3, INPUT);//pir sensor
pinMode(8, OUTPUT);//led
pinMode(2, OUTPUT);//buzzer
}
void loop() {
int value= digitalRead(3);
if (value == HIGH){
digitalWrite(8, HIGH);
delay(50);
digitalWrite(8, LOW);
delay(50);
}if (value == HIGH){
digitalWrite(2, HIGH);
}if (value == LOW){
digitalWrite(8, LOW);
digitalWrite(2, LOW);
}
}
ผลของการทดสอบ
- เมื่อยกมือหรือเดินผ่าน เซ็นเซอร์จะตรวจจับการเคลื่อนไหวและส่งผลแสดงออกเป็นเสียงและแสงไฟกะพริบ
- เมื่อนำไปทดสอบโดยวางไว้ในบริเวณที่มีนกพิราบ ปรากฏว่าเครื่องสามารถส่งเสียงและไฟกะพริบออกมาได้และนกพิราบบินหนี
ขั้นตอนประกอบวงจรตามที่ได้ออกแบบวงจรไว้โดยมีขั้นตอนดังนี้
| ขั้นตอน | การดำเนินการ | |
| 1 | เตรียมวัสดุอุปกรณ์การประกอบเครื่องไล่นกพิราบอัตโนมัติ
|
|
| 2 | การต่อวงจร PIR Sensor, LED และBuzzer เข้ากับโพรโทบอร์ดและต่อโพรโทบอร์ด
|
 |
| 3 | Upload โปรแกรมเข้ากับ บอร์ด Arduino
|
 |
| 4 | ทดสอบการทำงานของวงจร
|
 |
| 5 | ประกอบเข้ากล่องเพื่อใช้งาน
|
  |






วีดีโอผลงาน
คณะผู้จัดทำโครงงาน
| นางสาวรุจิรา หนูภักดี ระดับชั้นมัธยมศึกษาปีที่ ๖ |  |
| นางสาววิชญาดา รองเลื่อน ระดับชั้นมัธยมศึกษาปีที่ ๖ |  |
| นางสาวปิยรัตน์ ขาวล้วน ระดับชั้นมัธยมศึกษาปีที่ ๖ |  |
อาจารย์ที่ปรึกษา
| 1. นางสาวอุบลวรรณ เมืองแก้ว | สอนวิชา วิทยาศาสตร์ |
| โทรศัพท์ 093-7144874 | Email : mubonwan_sspt2014@hotmail.com |
| 2. นางสุกัญญา ขาวเผือก | สอนวิชา คอมพิวเตอร์ |
| โทรศัพท์ 086-9695205 | E-mail : ssptsukanya2559@gmail.com |
สถานที่ติดต่อ
| โรงเรียน | โรงเรียนศึกษาสงเคราะห์พัทลุง อำเภอเมืองพัทลุง จังหวัดพัทลุง
Sueksa Songkhro Phatthalung School, Phatthalung |
| ที่อยู่ | 170 หมู่ 1 ตำบลควนมะพร้าว อำเภอเมือง จังหวัดพัทลุง |
| โทรศัพท์ | 074-673786, 074-673982 |
| โทรสาร | 074-829748 |
| sspt53@gmail.com | |
เว็บไซต์ |
www.sspt.ac.th |