โครงงานสปริงเกอร์อัตโนมัติ
ที่มาและความสำคัญ
ปัจจุบันนี้โรงเรียนราชประชานุเคราะห์ ๕๔ จังหวัดอำนาจเจริญ จัดการเรียนการสอนโดยบูรณาการกับงานอาชีพเพื่อเป็นการส่งเสริมให้นักเรียนมีรายได้ระหว่างเรียน เนื่องจากนักเรียนที่เข้าเรียนในโรงเรียนราชประชานุเคราะห์ ๕๔ เป็นนักเรียนที่มีฐานะยากจน ทั้งนี้การส่งเสริมอาชีพให้กับนักเรียนไม่ใช่ให้มีรายได้ระหว่างเรียนแต่ยังให้นักเรียนมีอาชีพติดตัวไปด้วย ซึ่งอาชีพที่อยู่ในโรงเรียนก็มีมากมายอาทิ เช่น การสานตะกร้าโดยใช้เส้นพลาสติก การทำขนมหวาน การทำน้ำหวาน และส่วนมากที่ประกอบอาชีพกันก็คือการปลูกผักซึ่งทุกห้องทุกเรือนนอนก็จะมีกันปลูกอยู่มากมาย แต่การดูแลรักษาผักที่ปลูกบางห้อง บางเรือนนอนก็จะดูแลไม่ทั่วถึงทำให้ผักที่ปลูกไม่สวยงามและไม่น่ารับประทานเนื่องจากขาดน้ำ รดน้ำไม่ทั่วถึงบ้าง หรือลืมที่จะรดน้ำผักบ้าง
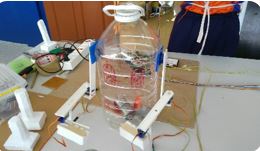
ผู้จัดทำโครงงานจึงได้เล็งเห็นปัญหาในการรดน้ำผักของแต่ละห้องและแต่ละเรือนนอน เพื่อช่วยในการรดน้ำได้อย่างสม่ำเสมอ จึงได้ศึกษาหาวิธีในการแก้ปัญหาการรดน้ำผักโดยการคิดค้นประดิษฐ์สปริงเกอร์อัตโนมัติขึ้น
หลักการทำงาน
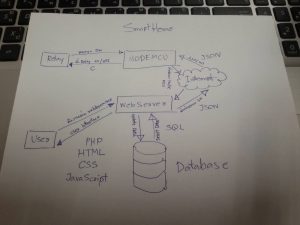
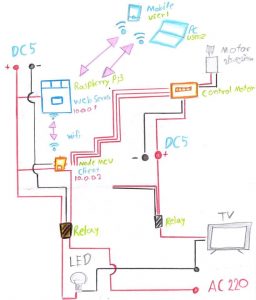
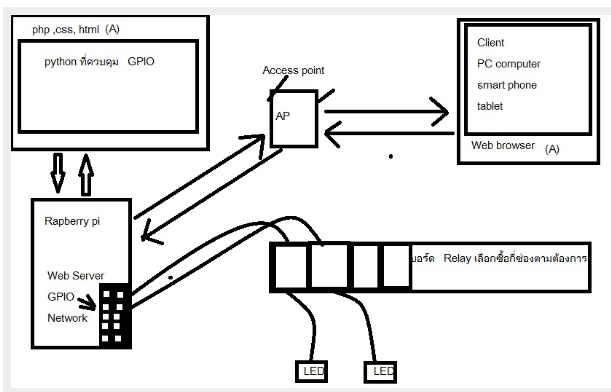
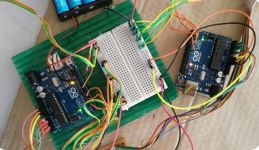
โปรแกรมคำสั่งของระบบแบ่งออกเป็น ๒ ระบบ คือ
๑.ระบบอัตโนมัติ ทำงานตามเวลาที่กำหนด (๗.๐๐ น.) เมื่อ Sensor วัดความชื้นในดินได้ค่าตามที่ตั้งไว้ พร้อมส่งข้อมูลไปบันทึกผลผ่าน Telegram จากนั้นเปิดน้ำทิ้งไว้ ๑๐ นาที หรือตามแต่ความต้องการของพืชแต่ละชนิดที่ปลูก จึงปิดน้ำ พร้อมส่งข้อมูลความชื้นให้แก่เจ้าของแปลงผักผ่าน Telegram
๒.ระบบความคุมและสั่งการผ่าน Telegram โดยพิมพ์คำสั่ง “on” มอเตอร์ A จะทำงาน Telegram ส่งข้อความแจ้งเตือนให้เจ้าของทราบว่าระบบ “แมนนวลเปิดอยู่” ในขณะเดียวกันระบบจะส่งค่าที่ความชื้นที่วัดได้ในแต่ละช่วงเวลา เมื่อเจ้าของเห็นว่าความชื้นในดินเพียงพอต่อการเจริญเติบโตของพืชที่ปลูกอยู่ ก็สามารถสั่งงานให้มอเตอร์ A หยุดทำงาน โดยพิมพ์คำว่า “Off” บนมือถือ เมื่อ มอเตอร์ A หยุดทำงาน จะส่งข้อความ “ปิดแมนนวล”ไปแจ้งแก่เจ้าของอีกครั้ง
ผลของการทดสอบ
บันทึกผลการทำงานทำงานต่อเนื่อง ๗ วัน ระบบทำงานรดน้ำตรงเวลาที่ตั้งไว้ และการสั่งงานระบบแมนนวลทำงานปกติ ค่าความชื้นที่ส่งผ่าน Telegram ตรงตามเงื่อนไขที่ต้องการ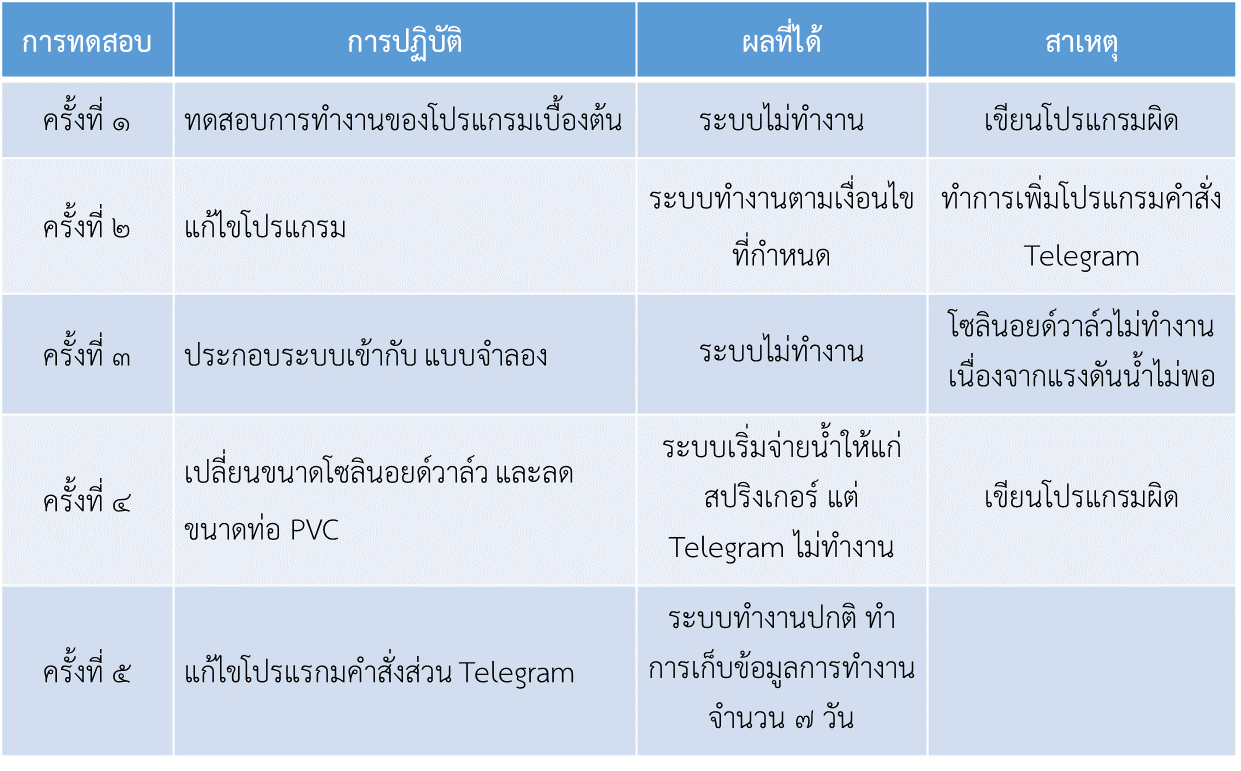
คณะผู้จัดทำโครงงาน
๑.นายพีรพัฒน์ กัลยาสิทธิ
๒.นายจักรินทร์ มงคลมาตย์
๓.นางสาวชลิตา ตุ่นต้น
อาจารย์ที่ปรึกษา
๑.นางพิทย์ระมัย วรสาร
๒.นายสิทธิพล ใจตรง
สถานที่ศึกษา
โรงเรียนราชประชานุเคราะห์ ๕๔ จังหวัดอำนาจเจริญ
































































 7.
7.