โครงงานแขนกลบำบัด
ที่มาและความสำคัญ
การทำงานที่มีความเสี่ยงและอันตราย มีผลถึงอุบัติเหตุที่อาจเกิดขึ้นต่อวัยวะของร่างกายของมนุษย์ บางครั้งส่งผลถึงแก่ชีวิตและทรัพย์สิน แก่บุคคลอันเป็นที่รักของครอบครัว และเพื่อลดการสูญเสียทรัพยากรมนุษย์และทรัพย์สินอื่น ๆ จึงได้แนวคิดที่ประดิษฐ์แขนกล เพื่อนำมาใช้ในภารกิจที่เสี่ยงต่อความสูญเสียที่อาจเกิดขึ้นโดยไม่ได้ตั้งใจ
ดังนั้น คณะผู้จัดทำ จึงคิดที่จะพัฒนาหุ่นยนต์แขนกลบำบัดขึ้นมา เพื่อจำลองการทำงานของหุ่นยนต์ตามการเคลื่อนไหวของมนุษย์ และเป็นการฝึกการเรียนรู้ ฝึกวิชาชีพของนักเรียน
หลักการทำงาน
ในการควบคุมตำแหน่งหรือความเร็ว Controller จะส่งสัญญาณ ควบคุม (Signal Command) ที่แทนด้วยจำนวนระยะทางและความเร็วออกมาหักลบกับสัญญาณที่มาจาก Encoder ผลต่างที่ได้จะถูกส่งไปยัง Driver เพื่อแปลงสัญญาณและขยายสัญญาณส่งไปขับเคลื่อนมอเตอร์ การทำงานของ Servo Driver ประกอบด้วย Control Loop ทั้งหมด ๓ Loop คือ
- ๑. Current Control Loop เป็นส่วนของการควบคุมกระแสไฟที่จ่ายให้กับมอเตอร์ซึ่งจะแปร ผันทางแรงบิด โดยรับสัญญาณ Analog มาจาก Output ของ speed Control Loop (KV) มา เปรียบเทียบกับ Current Detection Feedback
- ๒. Speed Control Loop เป็นส่วนของการควบคุมความเร็วของมอเตอร์ โดยรับสัญญาณ Analog มาจาก Output ของ Position Control Loop มาเปรียบเทียบกับ Speed Feedback จาก Encoder
- ๓. Position Control Loop เป็นส่วนของการควบคุมตำแหน่งโดยรับสัญญาณมาจาก Signal Command อาจจะเป็นสัญญาณ Analog หรือสัญญาณ Pluse มาเปรียบเทียบกับ Position Feed Back จาก Encode
ผลของการทดสอบ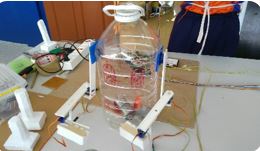
จากผลการทดลองแขนกล ตามลักษณะการเคลื่อนไหวตามสรีระของบุคคล แขนกลสามารถเคลื่อนไหวตามลักษณะบุคคลได้อย่างมีประสิทธิภาพที่ ร้อยละ ๗๐ และบุคคลจะต้องเคลื่อนที่อยู่ในระยะที่ทำมุมกับข้อต่อของหุ่นที่ ๐ – ๑๘๐ องศา การรับน้ำหนักของสิ่งของที่หุ่นยกได้อยู่ที่ ๑ – ๒ กรัม
คณะผู้จัดทำโครงงาน
๑.นายบัญชา แลเชอะ
๒.นางสาวณัฏฐา เวียงบรรพต
อาจารย์ที่ปรึกษา นายประพันธ์ นาบุญ
สถานที่ศึกษา โรงเรียนศึกษาสงเคราะห์เชียงใหม่ จังหวัดเชียงใหม่