โครงงาน : Smart-Farming
(ฟาร์มอัจฉริยะ)
คณะผู้จัดทำโครงงาน
- สามเณรจีระศักดิ์ กาศวิบูลย์
- สามเณรธนภัทร ธรรมจิตร
- สามเณรวีรภัทร เชิดอยู่
ครูที่ปรึกษาโครงงาน
- นายอนันต์ จินดาคำ
- นางสาวเบญจมาศ หงษ์ห้า
สถานศึกษา : โรงเรียนพุทธโกศัยวิทยา จังหวัดแพร่
16 ถนนเจริญเมือง ตำบล ในเวียง อำเภอเมืองแพร่ จังหวัดแพร่ 54000
ที่มาและความสำคัญของโครงงาน
ปัจจุบันเทคโนโลยี Internet of Things กำลังได้รับความนิยมเป็นอย่างมากเนื่องในยุค โลกาภิวัฒน์ ทางคณะผู้จัดทำได้มีความคิดว่าควรจะนำเทคโนโลยีส่วนนี้มาประยุกต์ใช้การเกษตร ซึ่งเกี่ยวข้องเกษตรกร โดยปัจจุบันมีโรงเลี้ยงหมูและสวนผักอยู่เป็นจำนวนมาก และโรงเลี้ยงหมูกับสวนผักส่วนใหญ่จะมีลักษณะเป็นฟาร์ม ซึ่งโรงเลี้ยงหมูและสวนผักเหล่านี้ยังคงมีปัญหาหลายประการ เช่น ปัญหาการชำระล้างมูลของหมู,ปัญหาการให้อาหารหมูที่เป็นเวลาและการให้น้ำผักที่เป็นเวลา ซึ่งเป็นเรื่องที่ยุ่งยากสำหรับเกษตรกรบางพวก เพราะเกษตรกรบางคนอาศัยอยู่เพียงลำพัง จึงเกิดปัญหาทางด้านจำนวนคน ดังนั้นพวกกระผมจึงได้คิดค้นนวัตกรรมนี้ขึ้นมา เพื่อความสะดวกสบายมากยิ่งขึ้น จึงเป็นที่มาของโครงงานนี้
วัตถุประสงค์
- ศึกษาการเขียนโปรแกรมและการทำงานของระบบสมองกลฝังตัว
- ศึกษาการทำโครงงานวิทยาศาสตร์สิ่งประดิษฐ์
- เสริมสร้างความคิดริเริ่มสร้างสรรค์ การแก้ไขปัญหาอย่างเป็นระบบ พัฒนากระบวนการคิด การกล้าแสดงออก
- สามารถนำโครงงานไปประยุกต์ใช้ได้จริง
- เพื่อเพิ่มความสะดวกสบายแก่เกษตรกร ในการจัดระบบภายในฟาร์ม เช่น ทำความสะอาด การให้อาหารการรดน้ำผัก และระบบการจัดการน้ำในฟาร์ม
วัสดุอุปกรณ์ที่ใช้ทำโครงงาน
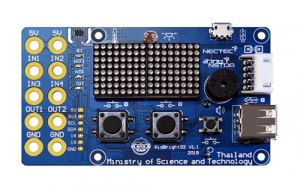
1. kid-bright
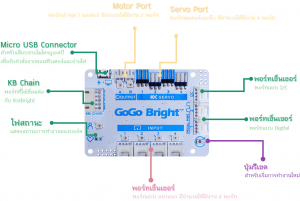
2. gogo bright
3. GoGo Board

4. Raspberri Pi

5. Relay

6.ไม้

7. หลอดไฟ

8. Adaptor & USB wire

9. แผ่นอลูมิเนียม
10. ปั๊มน้ำ

11. สายยาง

12.ท่อpvc

13. Servo morter

14. สายไฟจัมเปอร์สายแพร

15. Soil Moisture Sensor

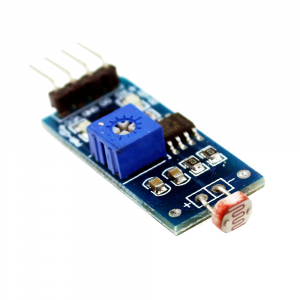
16. เซนเซอร์วัดระดับแสง
ผังโครงสร้าง
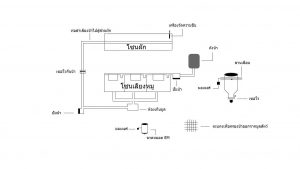
หลักการทำงาน
เงื่อนไขการทำงานของระบบ
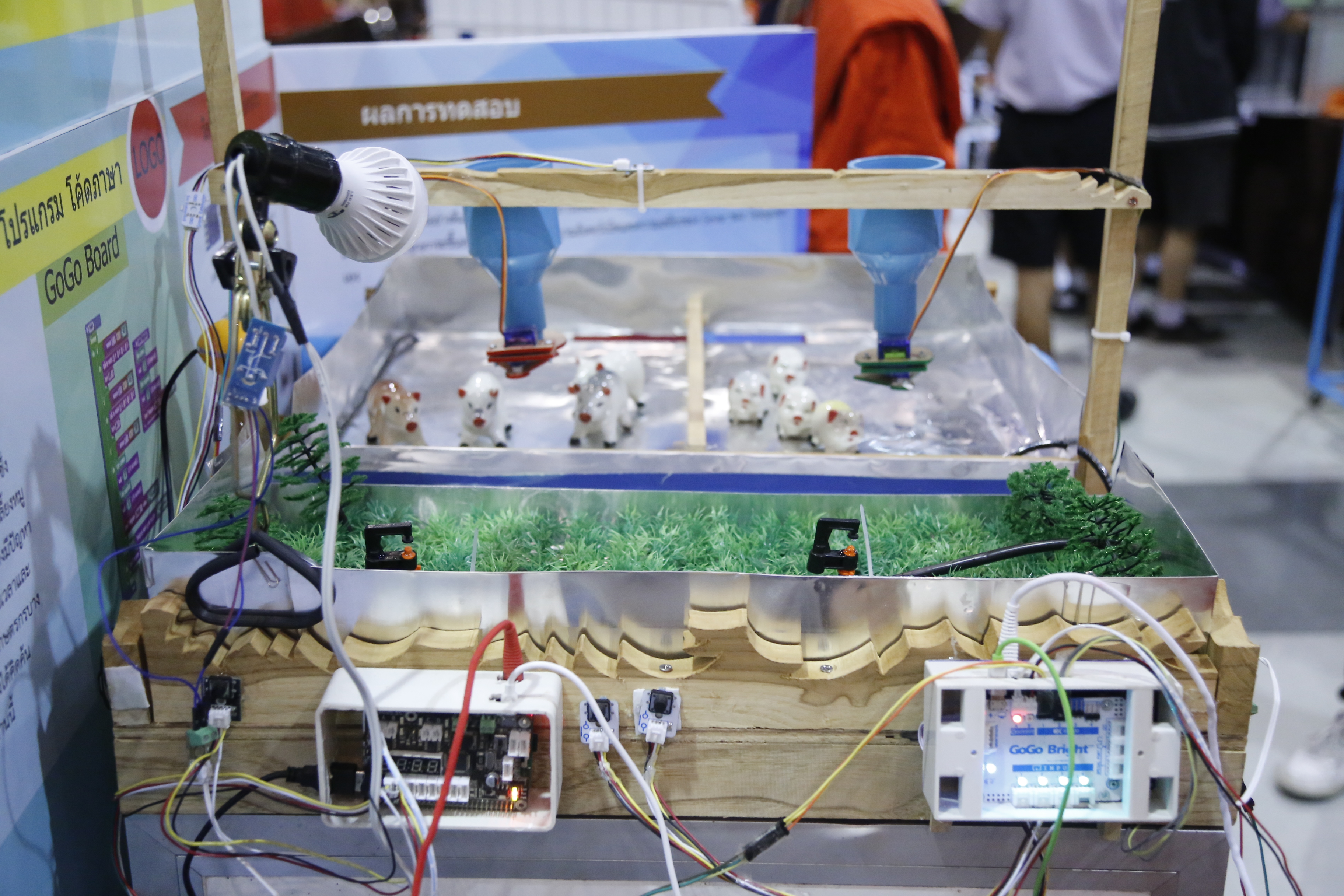
การติดตั้งระบบ(แบบจำลอง)
1. ติดตั้ง Kid bright และ GoGo bright ไว้ภายนอกฟาร์ม เสียบสาย micro USB ให้เรียบร้อยเสียบสาย INPUT SENSOR บนบอร์ดดังนี้
พอร์ตที่ 1 : เซนเซอร์วัดความชื้น จะทำการเสียบไว้ในดิน เพื่อที่จะได้วัดระดับความชื้นในดินหากดินเปียกจะทำการหยุดรดน้ำ แต่ถ้าหากดินแห้งจะทำการรดน้ำ
พอร์ตที่ 2 : Button1 เป็นปุ่มจำลองการล้างมูลหมูโดย เราจะนำปั้มน้ำต่อเข้ากับ relayเพื่อต่อเข้ากับบอร์ด kidbright สำหรับควบคุม
พอร์ตที่ 3 : Button2 ปุ่มจำลองในการให้อาหารหมู โดยเราจะใช้servo ในการให้อาหาร
2. เสียบสาย OUTPUT บนบอร์ดดังนี้
พอร์ต A : ต่อกับ Relay เพื่อควบคุมปั๊มน้ำตัวที่1
พอร์ต B : ต่อกับ Relay เพื่อควบคุมปั๊มน้ำตัวที่2
3. เสียบสาย SERVO บนบอร์ดดังนี้
พอร์ตที่ 1 : Servo 1 ควบคุมการให้อาหารหมูตัวที่1
พอร์ตที่ 2 : Servo 2 ควบคุมการให้อาหารหมูตัวที่2
4. ติดตั้ง GoGo Board และ Raspberry PI ไว้ภายนอกฟาร์ม เสียบสาย micro USB ให้เรียบร้อย แฟลชเมโมรี่การ์ดและลงระบบปฏิบัติการของ Pi ให้เรียบร้อย
1. เสียบสาย INPUT SENSOR บนบอร์ดดังนี้
พอร์ต 1 : เสียบตัววัดระดับแสงไว้ เพื่อใช้ในการเปิดปิดไฟ
2. เสียบสาย OUTPUT 5.1c บนบอร์ดดังนี้
พอร์ต A : ต่อกับ Relay เพื่อควบคุมหลอดไฟ
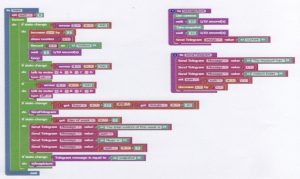
การทำงานของระบบ kidbright
- การทำงานของอุปกรณ์ในการให้อาหารหมู นั้นเราตั้งเวลาไว้ในเวลาเช้าและเวลาเย็น เมื่อถึงเวลาที่กำหนดเราจะสั่งให้Servo morter ทำงานเพื่อปล่อยให้อาหารหมูไหลลงสู่ถาดรองอาหาร
- การทำงานของอุปกรณ์ในการชำละล้างมูลหมู เราจะตั้งเวลาไว้ต้อนเช้าและตอนเย็น เมื่อถึงเวลาที่กำหนดระบบจะสั่งงานให้ปั้มน้ำทำงานเพื่อไปชำละล้างมูลหมู และน้ำที่ชำละล้างมูลหมูเราจะทำการกรองเพื่อนำไปรดน้ำผักต่อ
- ในส่วนของการรดน้ำผัก เราจะใช้เซ็นเซอร์ตรวจจับความชื้นในดินเพื่อสั่งงานให้ปั้มน้ำสำหรับรดน้ำผักทำงาน โดยเราจะตั้งเงือนไขไว้ว่าหากดินแห้งให้ทำการรดน้ำ หากดินเปียกให้ทำการหยุดรดน้ำ
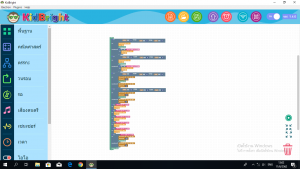
การทำงานของระบบ gogo board
ในส่วนของไฟเราจะใช้เซ็นเซอร์ตรวจจับแสงโดยจะตั้งเงื่อนไขไว้ว่าหากแสงมีน้อยจะทำการเปิดไฟทันที แต่หากแสงมีมากจะทำการปิดไฟ
CODE คำสั่งการทำงาน
ผลของการทดสอบ
สามารถใช้งานตามเงื่อนไขที่ได้กำหนดไว้
ระบบสามารถทำงานตามคำสั่งของ Algorithm ของโปรแกรมที่เขียนได้อย่างดีและมีประสิทธิภาพ โดยการทดสอบการควบคุมอุปกรณ์แบบต่างๆ แล้วพบว่าการส่งข้อมูล Telegram จะขึ้นอยู่กับคุณภาพของสัญญาณอินเตอร์เน็ตและความเสถียรของ Sever ของ Telegram เอง .
รูปการทำงาน
ขั้นตอนที่ 1 (Plan) : วางแผนปรึกษากำหนดเป้าหมาย / ศึกษาออกแบบชุดจำลองของโครงสรา้งที่ออกแบบ

ขั้นตอนที่ 2 (Do) : ลงมือปฏิบัติตามแผน/ออกแบบการเขียนโปรแกรมควบคุมระบบการทำงาน นำสู่การปฏิบัติทดลองเพื่อสั่งการทำงานของอุปกรณ์ ให้ทำงานตามกระบวนการต่างๆ ที่เรากำหนดไว้
ขั้นตอนที่ 3 (Check) : ติดตามตรวจสอบแก้ไขจากผลการทดลอง / ทดลองการทำงานของโครงงานให้เป็นไปตามเป้าหมายที่กำหนดไว้

ขั้นตอนที่ 4 (Action): ดำเนินการปรับปรุงพัฒนาโครงงานอย่างเหมาะสมให้สามารถใช้งานได้จริงและสามารถนำสู่การไปประยุกต์ใช้ได้
