โครงงาน
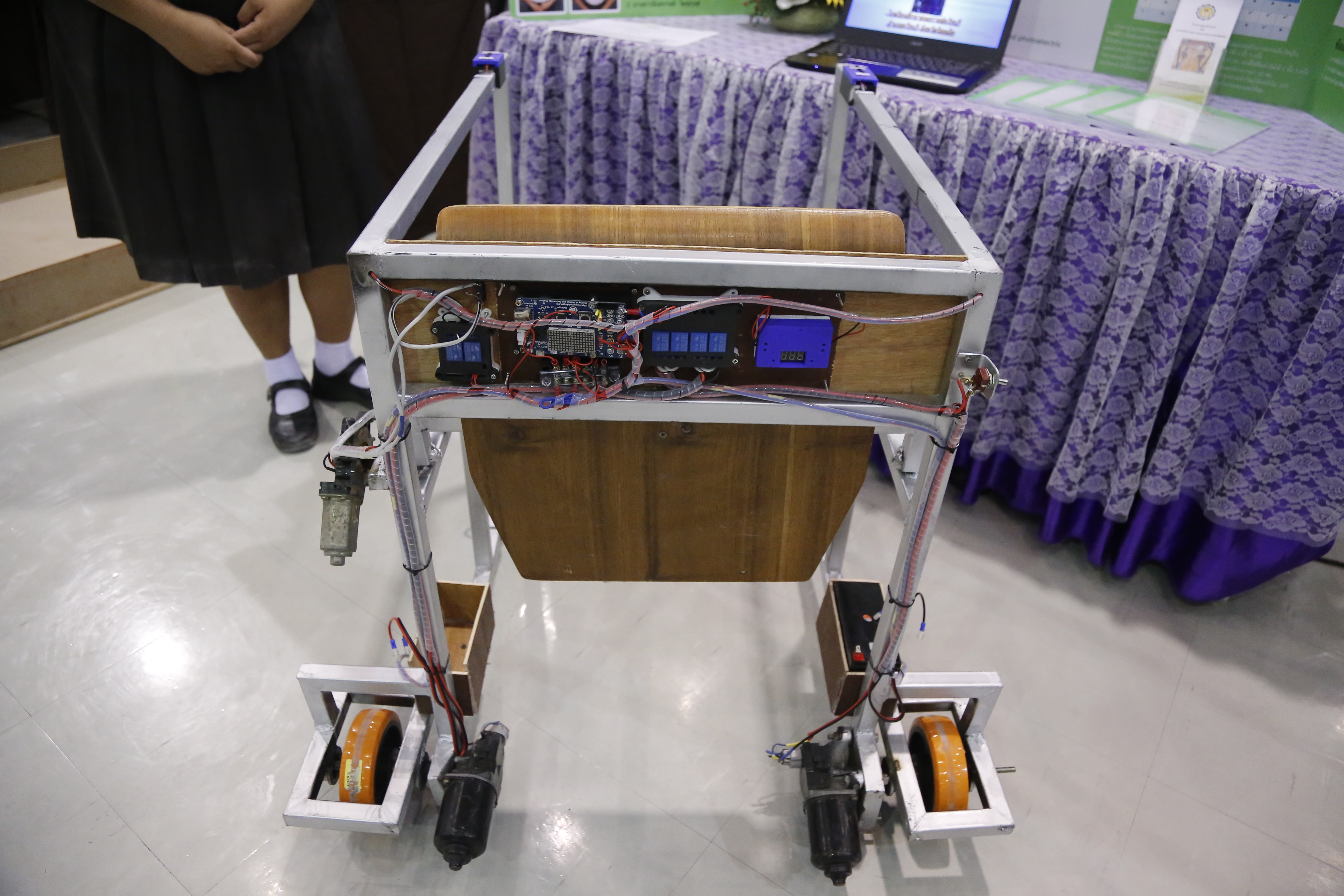
“เครื่องช่วยอำนวยตวามสะดวกในการฝึกเดิน”
ผู้จัดทำ
1. นางสาวจันทกานต์ ไตรยวงค์
2. นางสาวพวงผกา ผิวทอง
อาจารย์ที่ปรึกษา
1. นายคมกริช บุตรอุดม
2. ดร.ฐิติมา ผ่องแผ้ว
สถานศึกษา: โรงเรียนศึกษาสงเคราะหธวัชบุรี อำเภอธวัชบุรี จังหวัดร้อยเอ็ด
บทนำ
โครงงานระบบสมองกลฝังตัว เรื่อง อุปกรณ์อำนวยความสะดวกในการฝึกเดินมีวัตถุประสงค์เพื่อสร้างออกแบบและสร้างอุปกรณ์อำนวยความสะดวกในการช่วยฝึกเดิน จากการสำรวจปัญหาพบว่า ปัญหาการเคลื่อนไหวร่างกายที่เป็นไปอย่างยากลำบากจำเป็นต้องใช้ที่ช่วยพยุงในการเดิน ซึ่งที่ช่วยพยุงปกติจะต้องยกและค่อย ๆ ขยับ ในผู้ป่วยหรือผู้สูงอายุที่มีกล้ามเนื้ออ่อนแรงไม่สามารถยกได้และเดินไปสักระยะหนึ่งก็เหนื่อยหรือหมดแรงในการเดิน จึงเกิดแนวคิดในการจะแก้ไขปัญหาดังกล่าวโดยจะออกแบบอุปกรณ์อำนวยความสะดวกในการฝึกเดินโดยไม่ต้องยกและถ้าหากหมดแรงระหว่างทางสามารถมีเบาะนั่งบังคับได้ และมีปุ่มฉุกเฉินเมื่อต้องการความช่วยเหลือ
แนวคิดและหลักการ ผู้จัดทำได้นำบอร์ด KidBright เป็นอุปกรณ์ควบคุมการทำงานจากการเขียนโปรแกรม KidBright เพื่อสั่งงาน
อุปกรณ์ให้ทำงานตามเงื่อนไขที่กำหนด คือเมื่อเริ่มต้นการทำงาน
โหมดที่ 1 คือ “โหมดฝึกเดิน” มีเซนเซอร์ตรวจจับข้อเท้า 2 ตัวหากเซนเซอร์ทั้ง 2 ตัวตรวจพบข้อเท้าทั้ง 2 ข้าง KidBright จะสั่งให้มอเตอร์ทำงานล้อเลื่อนไปข้างหน้า หากไม่เป็นไปตามเงื่อนไขจะไม่มีการสั่งงานใด ๆ
โหมดที่ 2 คือ “โหมดบังคับ” ถ้าหากหมดแรงกดสวิตซ์ที่ 3 เปลี่ยนโหมดเป็นโหมดบังคับ เบาะจะลงมา ตำแหน่งที่เหมาะสมกับการนั่ง กดสวิตซ์ที่ 1 เลี้ยวซ้าย กดสวิตซ์ที่ 4 เลี้ยวขวา กดสวิตซ์ที่ 1กับที่ 4 พร้อมจะกัน เดินหน้า กดสวิตซ์ที่ 3 กับที่ 4 พร้อมกันจะถอยหลัง
โหมดที่ 3 คือ “โหมดฉุกเฉิน” เมื่อผู้ใช้ต้องการความช่วยเหลือให้กดสวิตซ์ที่ 2 KidBright จะสั่งงานให้แจ้งเตือนไปยัง
แอปพลิเคชั่น LINE
ผลจากการศึกษาพบว่า สามารถออกแบบและสร้างอุปกรณ์อำนวยความสะดวกในการช่วยฝึกเดินให้ทำงานตามเงื่อนไขที่กำหนดได้ถูกต้อง