โครงงานระบบปลูกพืชในโรงเรือน
ที่มาและความสำคัญ
โดยปกติการปลูกพืชในที่โล่งอาจต้องเจอปัญหาการระบาดของแมลง หรือเชื้อราที่เกิดจากความชื้นของฝน ทั้งยังเจอกับปัญหาสภาพอากาศในแต่ละฤดูกาลที่ไม่สามารถควบคุมได้ การปลูกพืชในโรงเรือนนั้นเราสามารถป้องกันแมลงไม่ให้เข้าไปทำลายพืชที่ปลูก และไม่ต้องใช้ยาฆ่าแมลง จึงมีความปลอดภัยจากสารพิษตกค้างในผลผลิต และป้องกันปัญหาที่มากับน้ำฝน เช่น โรคราน้ำค้าง รากเน่า ไปพร้อม ๆ กับการควบคุมความเข้มแสง และอุณหภูมิให้เหมาะสมกับพืชการเจริญเติบโตของพืชแต่ละชนิด โครงงานระบบปลูกพืชในโรงเรือนนี้มีวัตถุประสงค์ในการจัดทำเพื่อสร้างโรงเรือนในการปลูกพืชที่มีการป้องกันแมลงศัตรูพืช ที่สามารถควบคุมความเข้มแสงแดดและอุณหภูมิ พร้อมระบบการให้น้ำอัตโนมัติ สำหรับเป็นต้นแบบให้แก่เกษตรกรนำไปศึกษาปรับใช้กับการเพาะปลูกในพื้นรอบ ๆ โรงเรียนราชประชานุเคราะห์ ๒๕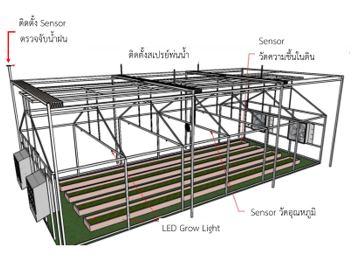
หลักการทำงาน
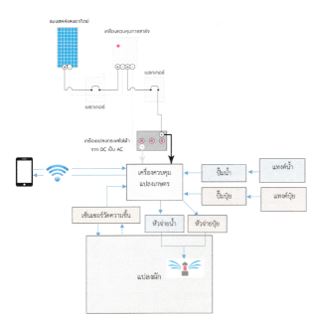
หลักการทำงานระบบปลูกพืชในโรงเรือนประกอบไปด้วย ๓ ส่วนดังนี้
- ๑. ระบบการควบคุมแสงแดดภายในโรงเรือน เมื่อแสงมีค่าความเข้มมากกว่าค่าที่กำหนดไว้ ระบบผ้าม่านพลางแสงจะทำงานโดยการปิด และตรงข้ามกันเมื่อมีความเข้มแสงมีความเข้มแสงน้อยระบบผ้าม่านพลางแสงจะทำงาน
- ๒. ระบบการควบคุมความเย็นภายในโรงเรือน เมื่อภายในโรงเรือนมีค่าอุณหภูมสู่งกว่าค่าที่กำหนดไว้ ระบบพัดลมทำความเย็น และระบายอากาศจะแบบอัตโนมัติเพื่อปรับอุณหภูมิ และหยุดทำงานเมื่อภายในโรงเรือนอุณหภูมิต่ำกว่าค่าที่กำหนด
- ๓. ระบบการให้น้ำพืชภายในโรงเรือน เมื่อดินในแปลงปลูกพืชภายในโรงเรือน มีค่าความชื้นน้อยกว่าค่าที่กำหนดไว้ ระบบปั้มสูบน้ำสำหรับรดนำพืชเปิดแบบอัตโนมัติ และตรงข้ามกันเมื่อดินในแปลงปลูกพืชภายในโรงเรือน มีความชื้นมากกว่าค่าที่กำหนดไว้ ระบบปั้มสูบน้ำสำหรับรดน้ำพืชปิดแบบอัตโนมัติ
ผลของการทดสอบ
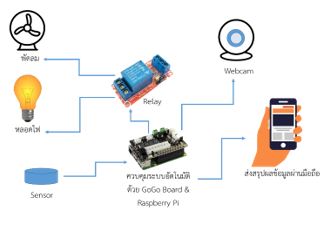
จากการทดสอบผลปรากฎว่า ระบบการความคุมความเข้มแสง การควบคุมอุณหภูมิ และระบบการควบคุมความชื้นในดิน สามารถทำงานเป็นไปตามค่าที่เรากำหนดไว้อย่างอัตโนมัติ การทดสอบในครั้งนี้เป็นเพียงการจำลองระบบโรงเรือนปลูกพืช ที่ติดตั้งระบบ
คณะผู้จัดทำโครงงาน
๑.นายวีระชัย ฟุ้งรุ่งโรจน์
๒.นายพิษศฤงคีวัฒน์ ฟองมี
๓.นายนพรัตน์ ชุ่มเชิง
อาจารย์ที่ปรึกษา
นายบัญชา บุญมี
สถานที่ศึกษา
โรงเรียนราชประชานุเคราะห์ ๒๕ จังหวัดแพร่










 https://sites.google.com/a/htp.ac.th/rachpracha51/contact
https://sites.google.com/a/htp.ac.th/rachpracha51/contact